このアイテムの引用には次の識別子を使用してください:
http://elartu.tntu.edu.ua/handle/123456789/18563
| タイトル: | Розробка системи керування роботом на основі нечіткої логіки |
| 著者: | Стрембіцький, Михайло Олексійович Паламар, Михайло Іванович Стрембіцький, Володимир Олексійович |
| 発行日: | 19-12月-2016 |
| Date of entry: | 19-12月-2016 |
| UDC: | 681.51 |
| キーワード: | керування рухом маршрут мікроконтроллер |
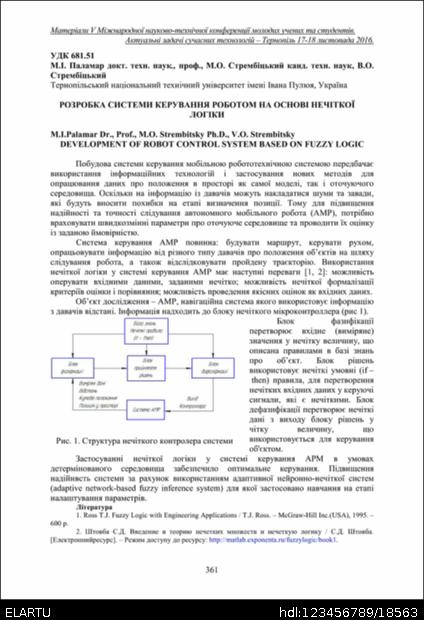
| 抄録: | Побудова системи керування мобільною робототехнічною системою передбачає використання інформаційних технологій і застосування нових методів для опрацювання даних про положення в просторі як самої моделі, так і оточуючого середовища. Оскільки на інформацію із давачів можуть накладатися шуми та завади, які будуть вносити похибки на етапі визначення позиції. Тому для підвищення надійності та точності слідування автономного мобільного робота (АМР), потрібно враховувати швидкозмінні параметри про оточуюче середовище та проводити їх оцінку із заданою ймовірністю. |
| URI: | http://elartu.tntu.edu.ua/handle/123456789/18563 |
| References (Ukraine): | 1. Ross T.J. Fuzzy Logic with Engineering Applications / T.J. Ross. – McGraw-Hill Inc.(USA), 1995. – 600 p. 2. Штовба С.Д. Введение в теорию нечетких множеств и нечеткую логику / С.Д. Штовба. [Електроннийресурс]. – Режим доступу до ресурсу: http://matlab.exponenta.ru/fuzzylogic/book1. |
| Content type: | Other |
| 出現コレクション: | Навчальні матеріали кафедри приладів і контрольно-вимірювальних систем |
このアイテムのファイル:
| ファイル | 記述 | サイズ | フォーマット | |
|---|---|---|---|---|
| selection.pdf | 204,23 kB | Adobe PDF | 見る/開く | |
| selection.djvu | 57,46 kB | DjVu | 見る/開く | |
| selection__COVER.png | 422,42 kB | image/png | 見る/開く |
このリポジトリに保管されているアイテムはすべて著作権により保護されています。
管理ツール