Ezzel az azonosítóval hivatkozhat erre a dokumentumra forrásmegjelölésben vagy hiperhivatkozás esetén:
http://elartu.tntu.edu.ua/handle/lib/45638
| Title: | Вплив фрикційних властивостей конвеєрних систем на процес робототехнічного маніпулювання гнучких об’єктів |
| Other Titles: | Influence of frictional properties of conveyor systems on the process of robotic manipulation of flexible objects |
| Authors: | Михайлишин, Роман Ігорович Духон, Франтішек Михайлишин, Михайло Стахович Келемен, Міхал Сяо, Джін Фей, Енн Маєвич Mykhailyshyn, Roman Duchon, Frantisek Mykhailyshyn, Mykhailo Kelemen, Michal Xiao, Jing Fey, Ann Majewicz |
| Affiliation: | Тернопільський національний технічний університет імені Івана Пулюя, Україна Амерікан Юніверсіті Київ, Україна Словацький технологічний університет в Братиславі, Словацька Республіка Технологічний університет в Кошице, Словацька Республіка Вустерський політехнічний інститут, Сполучені Штати Америки Техаський університет в Остіні, Сполучені Штати Америки |
| Bibliographic description (Ukraine): | Вплив фрикційних властивостей конвеєрних систем на процес робототехнічного маніпулювання гнучких об’єктів / Роман Ігорович Михайлишин, Франтішек Духон, Михайло Стахович Михайлишин, Міхал Келемен, Джін Сяо, Енн Маєвич Фей // Матеріали Ⅰ Міжнародної науково-технічної конференції „Прикладна механіка“, 6-7 червня 2024 р. — Т. : ТНТУ, 2024. — С. 311–313. — (Мехатроніка, робототехніка, дрони). |
| Bibliographic description (International): | Mykhailyshyn R., Duchon F., Mykhailyshyn M., Kelemen M., Xiao J., Fey A. M. (2024) Vplyv fryktsiinykh vlastyvostei konveiernykh system na protses robototekhnichnoho manipuliuvannia hnuchkykh obiektiv [Influence of frictional properties of conveyor systems on the process of robotic manipulation of flexible objects]. Proceeding of Ⅰ-st International Conference "Applied Mechanics" (Tern., 6-7 June 2024), pp. 311-313 [in Ukrainian]. |
| Is part of: | Матеріали Ⅰ Міжнародної науково-технічної конференції „Прикладна механіка“, 2024 Proceeding of Ⅰ-st International Conference "Applied Mechanics", 2024 |
| Conference/Event: | Ⅰ Міжнародна науково-технічна конференція „Прикладна механіка“ |
| Journal/Collection: | Матеріали Ⅰ Міжнародної науково-технічної конференції „Прикладна механіка“ |
| Issue Date: | 6-jún-2024 |
| Date of entry: | 28-jún-2024 |
| Publisher: | ТНТУ TNTU |
| Place of the edition/event: | Тернопіль Ternopil |
| Temporal Coverage: | 6-7 червня 2024 р. 6-7 June 2024 |
| UDC: | 621.865 |
| Keywords: | робототехніка тертя маніпулювання захоплення гнучкий обєкт robotics friction manipulation grasping flexible object |
| Number of pages: | 3 |
| Page range: | 311-313 |
| Start page: | 311 |
| End page: | 313 |
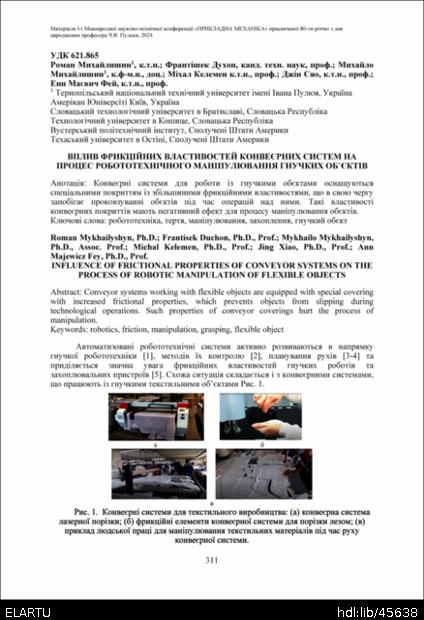
| Abstract: | Конвеєрні системи для роботи із гнучкими обєктами оснащуються спеціальними покриттям із збільшиними фрикційними властивостями, що в свою чергу запобігає проковзуванні обєктів під час операцій над ними. Такі властивості конвеєрних покриттів мають негативний ефект для процесу маніпулювання обєктів Conveyor systems working with flexible objects are equipped with special covering with increased frictional properties, which prevents objects from slipping during technological operations. Such properties of conveyor coverings hurt the process of manipulation |
| URI: | http://elartu.tntu.edu.ua/handle/lib/45638 |
| ISBN: | 978-617-7875-80-1 |
| Copyright owner: | © Тернопільський національний технічний університет імені Івана Пулюя, 2024 |
| References (Ukraine): | 1. Sensing of Continuum Robots: A Review / P.J. Sincak, E. Prada, L. Miková, R. Mykhailyshyn, M. Varga, T. Merva, I. Virgala // Sensors. – 24(4). – 2024. – DOI: 10.3390/s24041311. 2. Mathematical Modeling of Robotic Locomotion Systems / E. Prada, L. Mikova, I. Virgala, M. Kelemen, P.J. Sinčák, R. Mykhailyshyn // Symmetry. – 16(3). – 2024. DOI: 10.3390/sym16030376 3. Robot Trajectory Planning / D. Hroncova, P. Sincak, T. Merva R. Mykhailyshyn // MM Science Journal. – 2022. – DOI: 10.17973/MMSJ.2022_11_2022093. 4. Global Path Planning Method Based on a Modification of the Wavefront Algorithmfor Ground Mobile Robots / R. Mykhailyshyn, V. Savkiv, I. Diahovchenko, F. Duchon, R. Trembach // Robotics. – 12(1). – 2023. – P. 527-532. – DOI: 10.3390/robotics12010025. 5. Substantiation of Parameters of Friction Elements of Bernoulli Grippers With a Cylindrical Nozzle / R. Mykhailyshyn, V. Savkiv, I. Boyko, E. Prada, & I. Virgala // International Journal of Manufacturing, Materials, and Mechanical Engineering (IJMMME). – 11(2). – 2021. – P. 17-39. – DOI: 10.4018/IJMMME.2021040102. 6. A Systematic Review on Pneumatic Gripping Devices for Industrial Robots / R. Mykhailyshyn, V. Savkiv, P. Maruschak, J. Xiao // Transport. – 37(3). – 2022. – P. 201-231. – DOI: 10.3846/transport.2022.17110 7. Three-Dimensional Printing of Cylindrical Nozzle Elements of Bernoulli Gripping Devices for Industrial Robots / R. Mykhailyshyn, F. Duchoň, M. Mykhailyshyn, A. Majewicz Fey // Robotics. – 11(6). – 2022. – DOI: 10.3390/robotics11060140. 8. Optimization of Outer Diameter Bernoulli Gripper with Cylindrical Nozzle / R. Mykhailyshyn, F. Duchoň, I. Virgala, P.J. Sinčák, A. Majewicz Fey // Machines. – 11(6). – 2023. – DOI: 10.3390/machines11060667. 9. Influence of Inlet Parameters on Power Characteristics of Bernoulli Gripping Devices for Industrial Robots / R. Mykhailyshyn, J. Xiao // Applied Sciences. – 12(14). – 2022. 7074. DOI: 10.3390/app12147074. 10. Experimental Research of the Manipulatiom Process by the Objects Using Bernoulli Gripping Devices / R. Mykhailyshyn, V. Savkiv, M. Mikhalishin, F. Duchon // In Young Scientists Forum on Applied Physics and Engineering, International IEEE Conference. – 2017. – P. 8-11. – DOI: 10.1109/YSF.2017.8126583 11. Orientation Modeling of Bernoulli Gripper Device with Off-Centered Masses of the Manipulating Object / V. Savkiv, R. Mykhailyshyn, O. Fendo, M. Mykhailyshyn // Procedia Engineering. – 2017. – № 187. – P. 264-271. – DOI: 10.1016/j.proeng.2017.04.374 12. Михайлишин Р.І. Обґрунтування параметрів та орієнтації струминного захоплювача маніпулятора для автоматизації вантажно-розвантажувальних операцій: автореф. дис. на здобуття наук. ступеня канд. техн. наук : спец. 05.05.05 “Піднімально- транспортні машини” / Р.І. Михайлишин. – Тернопіль, 2018. – 21 с. 13. Energy efficiency analysis of the manipulation process by the industrial objects with the use of Bernoulli gripping devices / V. Savkiv, R. Mykhailyshyn, F. Duchoň, M. Mykhailyshyn // Journal of Electrical Engineering. – 2017. – 68(6). – P. 496-502. 14. Modeling of Bernoulli gripping device orientation when manipulating objects along the arc/ V. Savkiv, R. Mykhailyshyn, Duchoň, M. Mykhailyshyn // International Journal of Advanced Robotic Systems. – 15(2). – 2018. – P. 2397-2408. DOI: 10.1177/1729881418762670 15. Gripping Device for Textile Materials / R. Mykhailyshyn, V. Savkiv, A. Majewicz Fey, & J. Xiao // IEEE Transactions on Automation Science and Engineering. – 20(4). – 2023. – P. 2397-2408. DOI: 10.1109/TASE.2022.3208796 16. Low-Contact Grasping of Soft Tissue using a Novel Vortex Gripper / R. Mykhailyshyn, A. Majewicz Fey // 2024 International Symposium on Medical Robotics (ISMR). – 2024. 17. Finite element modeling of grasping porous materials in robotics cells / R. Mykhailyshyn, A. Majewicz Fey, J. Xiao // Robotica. – 41(2). – 2023. – P. 3485-3500. – DOI: 10.1017/S0263574723001121. 18. Problems Modeling the Process of Manipulation Flexible Objects in Robotics / R. Mykhailyshyn, M. Mykhailyshyn, F. Duchon, M. Kelemen, A. Majewicz Fey, J. Xiao // International Scientific-Technical Conference "Mathematical Methods and Models of Technical and Economic Systems". – 2022. – P. 73-74. 19. Increasing the Holding Force of Non-Rigid Materials Through Robot End-Effector Reorientation / R. Mykhailyshyn, A. Majewicz Fey, J. Xiao // IROS 2023 Workshop on Leveraging Models for Contact-Rich Manipulation – IEEE, 2023. 20. Toward Novel Grasping of Non-Rigid Materials Through Robotic End-Effector Reorientation / R. Mykhailyshyn, A. Majewicz Fey, J. Xiao // IEEE/ASME Transactions on Mechatronics – 2024. DOI: 10.1109/TMECH.2023.3337628. |
| References (International): | 1. Sensing of Continuum Robots: A Review, P.J. Sincak, E. Prada, L. Miková, R. Mykhailyshyn, M. Varga, T. Merva, I. Virgala, Sensors, 24(4), 2024, DOI: 10.3390/s24041311. 2. Mathematical Modeling of Robotic Locomotion Systems, E. Prada, L. Mikova, I. Virgala, M. Kelemen, P.J. Sinčák, R. Mykhailyshyn, Symmetry, 16(3), 2024. DOI: 10.3390/sym16030376 3. Robot Trajectory Planning, D. Hroncova, P. Sincak, T. Merva R. Mykhailyshyn, MM Science Journal, 2022, DOI: 10.17973/MMSJ.2022_11_2022093. 4. Global Path Planning Method Based on a Modification of the Wavefront Algorithmfor Ground Mobile Robots, R. Mykhailyshyn, V. Savkiv, I. Diahovchenko, F. Duchon, R. Trembach, Robotics, 12(1), 2023, P. 527-532, DOI: 10.3390/robotics12010025. 5. Substantiation of Parameters of Friction Elements of Bernoulli Grippers With a Cylindrical Nozzle, R. Mykhailyshyn, V. Savkiv, I. Boyko, E. Prada, & I. Virgala, International Journal of Manufacturing, Materials, and Mechanical Engineering (IJMMME), 11(2), 2021, P. 17-39, DOI: 10.4018/IJMMME.2021040102. 6. A Systematic Review on Pneumatic Gripping Devices for Industrial Robots, R. Mykhailyshyn, V. Savkiv, P. Maruschak, J. Xiao, Transport, 37(3), 2022, P. 201-231, DOI: 10.3846/transport.2022.17110 7. Three-Dimensional Printing of Cylindrical Nozzle Elements of Bernoulli Gripping Devices for Industrial Robots, R. Mykhailyshyn, F. Duchoň, M. Mykhailyshyn, A. Majewicz Fey, Robotics, 11(6), 2022, DOI: 10.3390/robotics11060140. 8. Optimization of Outer Diameter Bernoulli Gripper with Cylindrical Nozzle, R. Mykhailyshyn, F. Duchoň, I. Virgala, P.J. Sinčák, A. Majewicz Fey, Machines, 11(6), 2023, DOI: 10.3390/machines11060667. 9. Influence of Inlet Parameters on Power Characteristics of Bernoulli Gripping Devices for Industrial Robots, R. Mykhailyshyn, J. Xiao, Applied Sciences, 12(14), 2022. 7074. DOI: 10.3390/app12147074. 10. Experimental Research of the Manipulatiom Process by the Objects Using Bernoulli Gripping Devices, R. Mykhailyshyn, V. Savkiv, M. Mikhalishin, F. Duchon, In Young Scientists Forum on Applied Physics and Engineering, International IEEE Conference, 2017, P. 8-11, DOI: 10.1109/YSF.2017.8126583 11. Orientation Modeling of Bernoulli Gripper Device with Off-Centered Masses of the Manipulating Object, V. Savkiv, R. Mykhailyshyn, O. Fendo, M. Mykhailyshyn, Procedia Engineering, 2017, No 187, P. 264-271, DOI: 10.1016/j.proeng.2017.04.374 12. Mykhailyshyn R.I. Obgruntuvannia parametriv ta oriientatsii strumynnoho zakhopliuvacha manipuliatora dlia avtomatyzatsii vantazhno-rozvantazhuvalnykh operatsii: avtoref. dys. na zdobuttia nauk. stupenia kand. tekhn. nauk : spets. 05.05.05 "Pidnimalno- transportni mashyny", R.I. Mykhailyshyn, Ternopil, 2018, 21 p. 13. Energy efficiency analysis of the manipulation process by the industrial objects with the use of Bernoulli gripping devices, V. Savkiv, R. Mykhailyshyn, F. Duchoň, M. Mykhailyshyn, Journal of Electrical Engineering, 2017, 68(6), P. 496-502. 14. Modeling of Bernoulli gripping device orientation when manipulating objects along the arc/ V. Savkiv, R. Mykhailyshyn, Duchoň, M. Mykhailyshyn, International Journal of Advanced Robotic Systems, 15(2), 2018, P. 2397-2408. DOI: 10.1177/1729881418762670 15. Gripping Device for Textile Materials, R. Mykhailyshyn, V. Savkiv, A. Majewicz Fey, & J. Xiao, IEEE Transactions on Automation Science and Engineering, 20(4), 2023, P. 2397-2408. DOI: 10.1109/TASE.2022.3208796 16. Low-Contact Grasping of Soft Tissue using a Novel Vortex Gripper, R. Mykhailyshyn, A. Majewicz Fey, 2024 International Symposium on Medical Robotics (ISMR), 2024. 17. Finite element modeling of grasping porous materials in robotics cells, R. Mykhailyshyn, A. Majewicz Fey, J. Xiao, Robotica, 41(2), 2023, P. 3485-3500, DOI: 10.1017/S0263574723001121. 18. Problems Modeling the Process of Manipulation Flexible Objects in Robotics, R. Mykhailyshyn, M. Mykhailyshyn, F. Duchon, M. Kelemen, A. Majewicz Fey, J. Xiao, International Scientific-Technical Conference "Mathematical Methods and Models of Technical and Economic Systems", 2022, P. 73-74. 19. Increasing the Holding Force of Non-Rigid Materials Through Robot End-Effector Reorientation, R. Mykhailyshyn, A. Majewicz Fey, J. Xiao, IROS 2023 Workshop on Leveraging Models for Contact-Rich Manipulation – IEEE, 2023. 20. Toward Novel Grasping of Non-Rigid Materials Through Robotic End-Effector Reorientation, R. Mykhailyshyn, A. Majewicz Fey, J. Xiao, IEEE/ASME Transactions on Mechatronics – 2024. DOI: 10.1109/TMECH.2023.3337628. |
| Content type: | Conference Abstract |
| Ebben a gyűjteményben: | І Міжнародна науково-технічна конференція "Прикладна механіка" присвячена 80-ти річчю з дня народження професора Ч.В. Пульки (2024) |
Fájlok a dokumentumban:
| Fájl | Leírás | Méret | Formátum | |
|---|---|---|---|---|
| AM_2024_Mykhailyshyn_R-Influence_of_frictional_311-313.pdf | 937,37 kB | Adobe PDF | Megtekintés/Megnyitás | |
| AM_2024_Mykhailyshyn_R-Influence_of_frictional_311-313.djvu | 215,16 kB | DjVu | Megtekintés/Megnyitás | |
| AM_2024_Mykhailyshyn_R-Influence_of_frictional_311-313__COVER.png | 1,35 MB | image/png | Megtekintés/Megnyitás |
Minden dokumentum, ami a DSpace rendszerben szerepel, szerzői jogokkal védett. Minden jog fenntartva!