このアイテムの引用には次の識別子を使用してください:
http://elartu.tntu.edu.ua/handle/123456789/17945
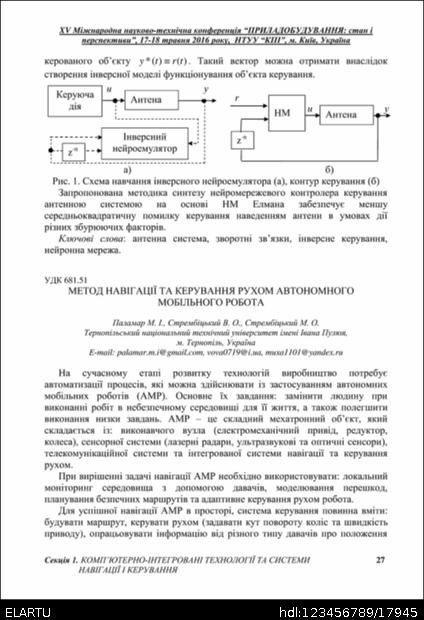
| タイトル: | Метод навігації та керування рухом автономного мобільного робота |
| 著者: | Паламар, Михайло Іванович Стрембіцький, Володимир Олексійович Стрембіцький, Михайло Олексійович |
| Affiliation: | Паламар М. І., Стрембіцький В. О., Стрембіцький М. О. Тернопільський національний технічний університет імені Івана Пулюя, м. Тернопіль, Україна E-mail: palamar.m.i@gmail.com, vova0719@i.ua, muxa1101@yandex.ru |
| Conference/Event: | XV Міжнародна науково-технічна конференція “Приладобудування: стан і перспективи” |
| 発行日: | 17-5月-2016 |
| Date of entry: | 23-9月-2016 |
| 出版者: | Тернопільський національний технічний університет ім. Івана Пулюя |
| Place of the edition/event: | НТУУ “КПІ”, м. Київ, Україна |
| Temporal Coverage: | 17-18 травня 2016 року |
| UDC: | 681.51 |
| キーワード: | автономний мобільний робот система керування навігаційна система сенсор |
| Number of pages: | 2 |
| Page range: | 27-28 |
| 抄録: | На сучасному етапі розвитку технологій виробництво потребує автоматизації процесів, які можна здійснювати із застосуванням автономних мобільних роботів (АМР). Основне їх завдання: замінити людину при виконанні робіт в небезпечному середовищі для її життя, а також полегшити виконання низки завдань. АМР – це складний мехатронний об’єкт, який складається із: виконавчого вузла (електромеханічний привід, редуктор, колеса), сенсорної системи (лазерні радари, ультразвукові та оптичні сенсори), телекомунікаційної системи та інтегрованої системи навігації та керування рухом. |
| URI: | http://elartu.tntu.edu.ua/handle/123456789/17945 |
| Content type: | Other |
| 出現コレクション: | Зібрання статей |
このアイテムのファイル:
| ファイル | 記述 | サイズ | フォーマット | |
|---|---|---|---|---|
| selection_2.pdf | 324,52 kB | Adobe PDF | 見る/開く | |
| selection_2.djvu | 77,61 kB | DjVu | 見る/開く | |
| selection_2__COVER.png | 358,11 kB | image/png | 見る/開く |
このリポジトリに保管されているアイテムはすべて著作権により保護されています。