Link lub cytat.
http://elartu.tntu.edu.ua/handle/lib/40619
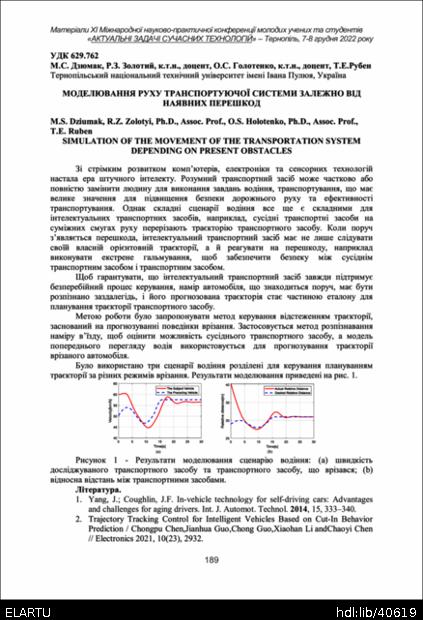
| Tytuł: | Моделювання руху транспортуючої системи залежно від наявних перешкод |
| Inne tytuły: | Simulation of the movement of the transportation system depending on present obstacles |
| Authors: | Дзюмак, М. С. Золотий, Роман Захарійович Голотенко, О. С. Рубен, Т. Е. Dziumak, M. S. Zolotyi, R. Z. Holotenko, O. S. Ruben, T. E. |
| Affiliation: | Тернопільський національний технічний університет імені Івана Пулюя, Україна |
| Bibliographic description (Ukraine): | Моделювання руху транспортуючої системи залежно від наявних перешкод / М. С. Дзюмак, Р. З. Золотий, О. С. Голотенко, Т. Е. Рубен // ⅩⅠ Міжнародна науково-практична конференція молодих учених та студентів „Актуальні задачі сучасних технологій“, 7-8 грудня 2022 року. — Т. : ТНТУ, 2022. — С. 189. — (Комп’ютерно-інформаційні технології та системи зв’язку). |
| Bibliographic description (International): | Dziumak M. S., Zolotyi R. Z., Holotenko O. S., Ruben T. E. (2022) Modeliuvannia rukhu transportuiuchoi systemy zalezhno vid naiavnykh pereshkod [Simulation of the movement of the transportation system depending on present obstacles]. ⅩⅠ International scientific and practical conference of young researchers and students „Current issues in modern technologies“ (Tern., 7-8 December 2022), pp. 189 [in Ukrainian]. |
| Część publikacji: | Матеріали ⅩⅠ Міжнародної науково-практичної конференції молодих учених та студентів „Актуальні задачі сучасних технологій“, 2022 Book of abstracts of the ⅩⅠ International scientific and practical conference of young researchers and students „Current issues in modern technologies“, 2022 |
| Konferencja/wydarzenie: | ⅩⅠ Міжнародна науково-практична конференція молодих учених та студентів „Актуальні задачі сучасних технологій“ |
| Journal/kolekcja: | Матеріали ⅩⅠ Міжнародної науково-практичної конференції молодих учених та студентів „Актуальні задачі сучасних технологій“ |
| Data wydania: | 7-gru-2022 |
| Date of entry: | 15-lut-2023 |
| Wydawca: | ТНТУ TNTU |
| Place edycja: | Тернопіль Ternopil |
| Zakresu czasowego: | 7-8 грудня 2022 року 7-8 December 2022 |
| UDC: | 629.762 |
| Strony: | 1 |
| Zakres stron: | 189 |
| Główna strona: | 189 |
| Strona końcowa: | 189 |
| URI: | http://elartu.tntu.edu.ua/handle/lib/40619 |
| ISBN: | 978-617-7875-49-8 |
| Wykaz piśmiennictwa: | 1. Yang, J.; Coughlin, J.F. In-vehicle technology for self-driving cars: Advantages and challenges for aging drivers. Int. J. Automot. Technol. 2014, 15, 333–340. 2. Trajectory Tracking Control for Intelligent Vehicles Based on Cut-In Behavior Prediction / Chongpu Chen,Jianhua Guo,Chong Guo,Xiaohan Li andChaoyi Chen// Electronics 2021, 10(23), 2932. |
| References: | 1. Yang, J.; Coughlin, J.F. In-vehicle technology for self-driving cars: Advantages and challenges for aging drivers. Int. J. Automot. Technol. 2014, 15, 333–340. 2. Trajectory Tracking Control for Intelligent Vehicles Based on Cut-In Behavior Prediction, Chongpu Chen,Jianhua Guo,Chong Guo,Xiaohan Li andChaoyi Chen// Electronics 2021, 10(23), 2932. |
| Typ zawartości: | Conference Abstract |
| Występuje w kolekcjach: | Ⅺ Міжнародна науково-практична конференція молодих учених та студентів „Актуальні задачі сучасних технологій“ (2022) |
Pliki tej pozycji:
| Plik | Opis | Wielkość | Format | |
|---|---|---|---|---|
| MNPK_2022_Dziumak_M_S-Simulation_of_the_movement_189.pdf | 277,84 kB | Adobe PDF | Przeglądanie/Otwarcie | |
| MNPK_2022_Dziumak_M_S-Simulation_of_the_movement_189.djvu | 61,62 kB | DjVu | Przeglądanie/Otwarcie | |
| MNPK_2022_Dziumak_M_S-Simulation_of_the_movement_189__COVER.png | 1,1 MB | image/png | Przeglądanie/Otwarcie |
Pozycje DSpace są chronione prawami autorskimi