Empreu aquest identificador per citar o enllaçar aquest ítem:
http://elartu.tntu.edu.ua/handle/lib/37597
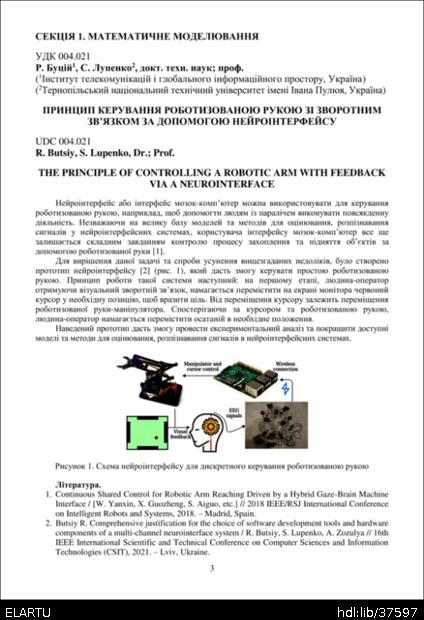
| Títol: | Принцип керування роботизованою рукою зі зворотним зв’язком за допомогою нейроінтерфейсу |
| Altres títols: | The principle of controlling a robotic arm with feedback via a neurointerface |
| Autor: | Буцій, Р. Лупенко, Сергій Анатолійович Butsiy, R. Lupenko, S. |
| Affiliation: | Інститут телекомунікацій і глобального інформаційного простору, Україна Тернопільський національний технічний університет імені Івана Пулюя, Україна |
| Bibliographic description (Ukraine): | Буцій Р. Принцип керування роботизованою рукою зі зворотним зв’язком за допомогою нейроінтерфейсу / Р. Буцій, Сергій Лупенко // Матеріали Ⅸ науково-технічної конференції „Інформаційні моделі, системи та технології“, 08-09 грудня 2021 року. — Т. : ТНТУ, 2021. — С. 3. — (Математичне моделювання). |
| Bibliographic description (International): | Butsiy R., Lupenko S. (2021) Pryntsyp keruvannia robotyzovanoiu rukoiu zi zvorotnym zviazkom za dopomohoiu neirointerfeisu [The principle of controlling a robotic arm with feedback via a neurointerface]. Proceedings of the scientific and technical conference "Information models, systems and technologies" (Tern., 08-09 December 2021), pp. 3 [in Ukrainian]. |
| Is part of: | Матеріали Ⅸ науково-технічної конференції „Інформаційні моделі, системи та технології“, 2021 Proceedings of the scientific and technical conference "Information models, systems and technologies", 2021 |
| Conference/Event: | Ⅸ науково-технічна конференція „Інформаційні моделі, системи та технології“ |
| Journal/Collection: | Матеріали Ⅸ науково-технічної конференції „Інформаційні моделі, системи та технології“ |
| Data de publicació: | 8-de - 21 |
| Date of entry: | 23-de -2022 |
| Editorial: | ТНТУ TNTU |
| Place of the edition/event: | Тернопіль Ternopil |
| Temporal Coverage: | 08-09 грудня 2021 року 08-09 December 2021 |
| UDC: | 004.021 |
| Number of pages: | 1 |
| Page range: | 3 |
| Start page: | 3 |
| End page: | 3 |
| URI: | http://elartu.tntu.edu.ua/handle/lib/37597 |
| Copyright owner: | © Тернопільський національний технічний університет імені Івана Пулюя, 2021 |
| References (Ukraine): | 1. Continuous Shared Control for Robotic Arm Reaching Driven by a Hybrid Gaze-Brain Machine Interface / [W. Yanxin, X. Guozheng, S. Aiguo, etc.] // 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018. – Madrid, Spain. 2. Butsiy R. Comprehensive justification for the choice of software development tools and hardware components of a multi-channel neurointerface system / R. Butsiy, S. Lupenko, A. Zozulya // 16th IEEE International Scientific and Technical Conference on Computer Sciences and Information Technologies (CSIT), 2021. – Lviv, Ukraine. |
| References (International): | 1. Continuous Shared Control for Robotic Arm Reaching Driven by a Hybrid Gaze-Brain Machine Interface, [W. Yanxin, X. Guozheng, S. Aiguo, etc.], 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018, Madrid, Spain. 2. Butsiy R. Comprehensive justification for the choice of software development tools and hardware components of a multi-channel neurointerface system, R. Butsiy, S. Lupenko, A. Zozulya, 16th IEEE International Scientific and Technical Conference on Computer Sciences and Information Technologies (CSIT), 2021, Lviv, Ukraine. |
| Content type: | Conference Abstract |
| Apareix a les col·leccions: | IX науково-технічна конференція „Інформаційні моделі, системи та технології“ (2021) |
Arxius per aquest ítem:
| Arxiu | Descripció | Mida | Format | |
|---|---|---|---|---|
| IMST_2021_Butsiy_R-The_principle_of_controlling_a_3.pdf | 509,82 kB | Adobe PDF | Veure/Obrir | |
| IMST_2021_Butsiy_R-The_principle_of_controlling_a_3.djvu | 60,92 kB | DjVu | Veure/Obrir | |
| IMST_2021_Butsiy_R-The_principle_of_controlling_a_3__COVER.png | 1,23 MB | image/png | Veure/Obrir |
Els ítems de DSpace es troben protegits per copyright, amb tots els drets reservats, sempre i quan no s’indiqui el contrari.