Будь ласка, використовуйте цей ідентифікатор, щоб цитувати або посилатися на цей матеріал:
http://elartu.tntu.edu.ua/handle/lib/37597
Повний запис метаданих
| Поле DC | Значення | Мова |
|---|---|---|
| dc.contributor.author | Буцій, Р. | |
| dc.contributor.author | Лупенко, Сергій Анатолійович | |
| dc.contributor.author | Butsiy, R. | |
| dc.contributor.author | Lupenko, S. | |
| dc.coverage.temporal | 08-09 грудня 2021 року | |
| dc.coverage.temporal | 08-09 December 2021 | |
| dc.date.accessioned | 2022-03-23T22:39:01Z | - |
| dc.date.available | 2022-03-23T22:39:01Z | - |
| dc.date.created | 21-12-08 | |
| dc.date.issued | 21-12-08 | |
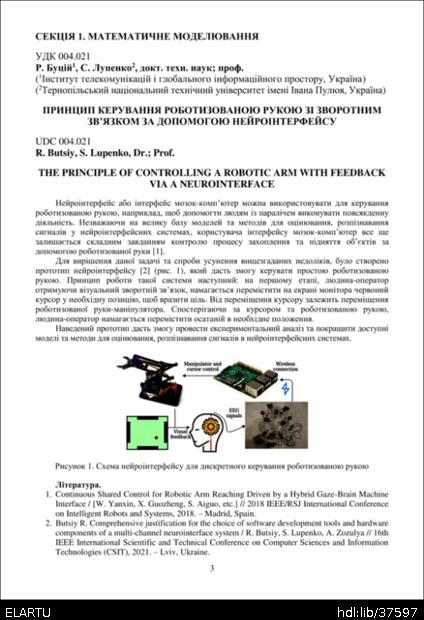
| dc.identifier.citation | Буцій Р. Принцип керування роботизованою рукою зі зворотним зв’язком за допомогою нейроінтерфейсу / Р. Буцій, Сергій Лупенко // Матеріали Ⅸ науково-технічної конференції „Інформаційні моделі, системи та технології“, 08-09 грудня 2021 року. — Т. : ТНТУ, 2021. — С. 3. — (Математичне моделювання). | |
| dc.identifier.uri | http://elartu.tntu.edu.ua/handle/lib/37597 | - |
| dc.format.extent | 3 | |
| dc.language.iso | uk | |
| dc.publisher | ТНТУ | |
| dc.publisher | TNTU | |
| dc.relation.ispartof | Матеріали Ⅸ науково-технічної конференції „Інформаційні моделі, системи та технології“, 2021 | |
| dc.relation.ispartof | Proceedings of the scientific and technical conference "Information models, systems and technologies", 2021 | |
| dc.title | Принцип керування роботизованою рукою зі зворотним зв’язком за допомогою нейроінтерфейсу | |
| dc.title.alternative | The principle of controlling a robotic arm with feedback via a neurointerface | |
| dc.type | Conference Abstract | |
| dc.rights.holder | © Тернопільський національний технічний університет імені Івана Пулюя, 2021 | |
| dc.coverage.placename | Тернопіль | |
| dc.coverage.placename | Ternopil | |
| dc.format.pages | 1 | |
| dc.subject.udc | 004.021 | |
| dc.relation.references | 1. Continuous Shared Control for Robotic Arm Reaching Driven by a Hybrid Gaze-Brain Machine Interface / [W. Yanxin, X. Guozheng, S. Aiguo, etc.] // 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018. – Madrid, Spain. | |
| dc.relation.references | 2. Butsiy R. Comprehensive justification for the choice of software development tools and hardware components of a multi-channel neurointerface system / R. Butsiy, S. Lupenko, A. Zozulya // 16th IEEE International Scientific and Technical Conference on Computer Sciences and Information Technologies (CSIT), 2021. – Lviv, Ukraine. | |
| dc.relation.referencesen | 1. Continuous Shared Control for Robotic Arm Reaching Driven by a Hybrid Gaze-Brain Machine Interface, [W. Yanxin, X. Guozheng, S. Aiguo, etc.], 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018, Madrid, Spain. | |
| dc.relation.referencesen | 2. Butsiy R. Comprehensive justification for the choice of software development tools and hardware components of a multi-channel neurointerface system, R. Butsiy, S. Lupenko, A. Zozulya, 16th IEEE International Scientific and Technical Conference on Computer Sciences and Information Technologies (CSIT), 2021, Lviv, Ukraine. | |
| dc.identifier.citationen | Butsiy R., Lupenko S. (2021) Pryntsyp keruvannia robotyzovanoiu rukoiu zi zvorotnym zviazkom za dopomohoiu neirointerfeisu [The principle of controlling a robotic arm with feedback via a neurointerface]. Proceedings of the scientific and technical conference "Information models, systems and technologies" (Tern., 08-09 December 2021), pp. 3 [in Ukrainian]. | |
| dc.contributor.affiliation | Інститут телекомунікацій і глобального інформаційного простору, Україна | |
| dc.contributor.affiliation | Тернопільський національний технічний університет імені Івана Пулюя, Україна | |
| dc.citation.journalTitle | Матеріали Ⅸ науково-технічної конференції „Інформаційні моделі, системи та технології“ | |
| dc.citation.spage | 3 | |
| dc.citation.epage | 3 | |
| dc.citation.conference | Ⅸ науково-технічна конференція „Інформаційні моделі, системи та технології“ | |
| Розташовується у зібраннях: | IX науково-технічна конференція „Інформаційні моделі, системи та технології“ (2021) | |
Файли цього матеріалу:
| Файл | Опис | Розмір | Формат | |
|---|---|---|---|---|
| IMST_2021_Butsiy_R-The_principle_of_controlling_a_3.pdf | 509,82 kB | Adobe PDF | Переглянути/відкрити | |
| IMST_2021_Butsiy_R-The_principle_of_controlling_a_3.djvu | 60,92 kB | DjVu | Переглянути/відкрити | |
| IMST_2021_Butsiy_R-The_principle_of_controlling_a_3__COVER.png | 1,23 MB | image/png | Переглянути/відкрити |
Усі матеріали в архіві електронних ресурсів захищені авторським правом, всі права збережені.