Denne identifikatoren kan du bruke til å sitere eller lenke til denne innførselen:
http://elartu.tntu.edu.ua/handle/lib/24220
| Tytuł: | Аналіз впливу параметрів базуючих елементів струминного захоплювального пристрою на його вантажопідіймальність |
| Inne tytuły: | The analysis influence of parameters basing elements bernoulli gripping device on its lifting force |
| Authors: | Михайлишин, Роман Ігорович Mykhailyshyn, Roman |
| Affiliation: | Тернопільський національний технічний університет імені Івана Пулюя |
| Bibliographic description (Ukraine): | Михайлишин Р. І. Аналіз впливу параметрів базуючих елементів струминного захоплювального пристрою на його вантажопідіймальність / Роман Михайлишин // Матеріали Ⅲ Всеукраїнської науково-технічної конференції „Теоретичні та прикладні аспекти радіотехніки і приладобудування“, 8-9 червня 2017 року. — Т. : ТНТУ, 2017. — С. 164–166. — (Автоматизація та комп’ютерні технології). |
| Bibliographic description (International): | Mykhailyshyn R. (2017) Analiz vplyvu parametriv bazuiuchykh elementiv strumynnoho zakhopliuvalnoho prystroiu na yoho vantazhopidiimalnist [The analysis influence of parameters basing elements bernoulli gripping device on its lifting force]. Materials of the Ⅲ All-Ukrainian Scientific and Technical Conference "Theoretical and Applied Aspects of Radio Engineering and Instrumentation" (Tern., 8-9 June 2017), pp. 164-166 [in Ukrainian]. |
| Część publikacji: | Матеріали Ⅲ Всеукраїнської науково-технічної конференції „Теоретичні та прикладні аспекти радіотехніки і приладобудування“ Materials of the Ⅲ All-Ukrainian Scientific and Technical Conference "Theoretical and Applied Aspects of Radio Engineering and Instrumentation" |
| Konferencja/wydarzenie: | Ⅲ Всеукраїнська науково-технічна конференція „Теоретичні та прикладні аспекти радіотехніки і приладобудування“ |
| Journal/kolekcja: | Матеріали Ⅲ Всеукраїнської науково-технічної конференції „Теоретичні та прикладні аспекти радіотехніки і приладобудування“ |
| Data wydania: | 8-cze-2017 |
| Date of entry: | 28-lut-2018 |
| Wydawca: | ТНТУ TNTU |
| Place edycja: | Тернопіль Ternopil |
| Zakresu czasowego: | 8-9 червня 2017 року 8-9 June 2017 |
| UDC: | 621.865.8 |
| Słowa kluczowe: | струминний захоплювальний пристрій об’єкт маніпулювання маніпулятор базуючий елемент промисловий робот bernoulli gripper device manipulating object manipulator basing elements industrial robot |
| Strony: | 3 |
| Zakres stron: | 164-166 |
| Główna strona: | 164 |
| Strona końcowa: | 166 |
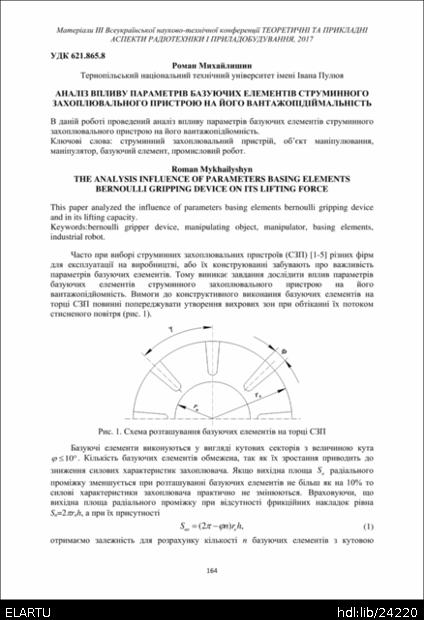
| Abstract: | В даній роботі проведений аналіз впливу параметрів базуючих елементів струминного
захоплювального пристрою на його вантажопідйомність. This paper analyzed the influence of parameters basing elements bernoulli gripping device and in its lifting capacity. |
| URI: | http://elartu.tntu.edu.ua/handle/lib/24220 |
| ISBN: | 978-617-7331-38-3 |
| Właściciel praw autorskich: | © Тернопільський національний технічний університет імені Івана Пулюя, 2017 |
| Związane URL literatura: | http://www.boschrexroth.com/pneumatics-catalog https://www.festo.com/net/sv_se/SupportPortal/default.aspx?cat=4564 https://www.schmalz.com/en/vacuum-technology-for-automation/vacuum-components/special-grippers/floating-suction-cups/floating-suction-cups-sbs http://www.smcworld.com/newproducts/en/xt661/ https://www.schmalz.com/en/10.01.01.12593 |
| Wykaz piśmiennictwa: | 1. Офіційний сайт фірми Bosch Rexroth [Електронний ресурс]– Режим доступу: http://www.boschrexroth.com/pneumatics-catalog 2. Офіційний сайт фірми Festo AG & Co [Електронний ресурс] – Режим доступу: https://www.festo.com/net/sv_se/SupportPortal/default.aspx?cat=4564 3. Офіційний сайт фірми Schmalz [Електронний ресурс] – Режим доступу: https://www.schmalz.com/en/vacuum-technology-for-automation/vacuum-components/special-grippers/floating-suction-cups/floating-suction-cups-sbs 4. Офіційний сайт фірми SMC [Електронний ресурс] – Режим доступу: http://www.smcworld.com/newproducts/en/xt661/ 5. Li Xin, Toshiharu Kagawa, Theoretical and experimental study of factors affecting the suction force of a Bernoulli gripper, Journal of Engineering Mechanics 140.9 (2014): 04014066. 6. Базуючі елементи фірмиSchmalz [Електронний ресурс] – Режим доступу: https://www.schmalz.com/en/10.01.01.12593 7. Savkiv, V., Mykhailyshyn, R., Fendo, O., Mykhailyshyn, M. (2017). Orientation Modeling of Bernoulli Gripper Device with Off-Centered Masses of the Manipulating Object. Procedia Engineering, 187, pp.264-271. |
| References: | 1. Ofitsiinyi sait firmy Bosch Rexroth [Electronic resource]– Access mode: http://www.boschrexroth.com/pneumatics-catalog 2. Ofitsiinyi sait firmy Festo AG & Co [Electronic resource] – Access mode: https://www.festo.com/net/sv_se/SupportPortal/default.aspx?cat=4564 3. Ofitsiinyi sait firmy Schmalz [Electronic resource] – Access mode: https://www.schmalz.com/en/vacuum-technology-for-automation/vacuum-components/special-grippers/floating-suction-cups/floating-suction-cups-sbs 4. Ofitsiinyi sait firmy SMC [Electronic resource] – Access mode: http://www.smcworld.com/newproducts/en/xt661/ 5. Li Xin, Toshiharu Kagawa, Theoretical and experimental study of factors affecting the suction force of a Bernoulli gripper, Journal of Engineering Mechanics 140.9 (2014): 04014066. 6. Bazuiuchi elementy firmySchmalz [Electronic resource] – Access mode: https://www.schmalz.com/en/10.01.01.12593 7. Savkiv, V., Mykhailyshyn, R., Fendo, O., Mykhailyshyn, M. (2017). Orientation Modeling of Bernoulli Gripper Device with Off-Centered Masses of the Manipulating Object. Procedia Engineering, 187, pp.264-271. |
| Typ zawartości: | Conference Abstract |
| Występuje w kolekcjach: | Ⅲ Всеукраїнська науково-технічна конференція „Теоретичні та прикладні аспекти радіотехніки і приладобудування“ (2017) |
Pliki tej pozycji:
| Plik | Opis | Wielkość | Format | |
|---|---|---|---|---|
| FPT_2017_Mykhailyshyn_R-The_analysis_influence_164-166.pdf | 1,58 MB | Adobe PDF | Przeglądanie/Otwarcie | |
| FPT_2017_Mykhailyshyn_R-The_analysis_influence_164-166.djvu | 186,3 kB | DjVu | Przeglądanie/Otwarcie | |
| FPT_2017_Mykhailyshyn_R-The_analysis_influence_164-166__COVER.png | 911,88 kB | image/png | Przeglądanie/Otwarcie |
Pozycje DSpace są chronione prawami autorskimi