Empreu aquest identificador per citar o enllaçar aquest ítem:
http://elartu.tntu.edu.ua/handle/lib/24162
| Títol: | Моделювання взаємодії «загарбний пристрій - об'єкт» |
| Altres títols: | Modeling of co-operation a «gripper of manipulator - object» |
| Autor: | Ащепкова, Наталія Чулков, Тимур Ashchepkova, Natalia Chulkov, Timur |
| Affiliation: | Дніпровський національний університет ім. О. Гончара |
| Bibliographic description (Ukraine): | Ащепкова Н. Моделювання взаємодії «загарбний пристрій - об'єкт» / Наталія Ащепкова, Тимур Чулков // Матеріали Ⅲ Всеукраїнської науково-технічної конференції „Теоретичні та прикладні аспекти радіотехніки і приладобудування“, 8-9 червня 2017 року. — Т. : ТНТУ, 2017. — С. 38–39. — (Обчислювальні методи та засоби в радіотехніці і приладобудуванні). |
| Bibliographic description (International): | Ashchepkova N., Chulkov T. (2017) Modeliuvannia vzaiemodii "zaharbnyi prystrii - obiekt" [Modeling of co-operation a «gripper of manipulator - object»]. Materials of the Ⅲ All-Ukrainian Scientific and Technical Conference "Theoretical and Applied Aspects of Radio Engineering and Instrumentation" (Tern., 8-9 June 2017), pp. 38-39 [in Ukrainian]. |
| Is part of: | Матеріали Ⅲ Всеукраїнської науково-технічної конференції „Теоретичні та прикладні аспекти радіотехніки і приладобудування“ Materials of the Ⅲ All-Ukrainian Scientific and Technical Conference "Theoretical and Applied Aspects of Radio Engineering and Instrumentation" |
| Conference/Event: | Ⅲ Всеукраїнська науково-технічна конференція „Теоретичні та прикладні аспекти радіотехніки і приладобудування“ |
| Journal/Collection: | Матеріали Ⅲ Всеукраїнської науково-технічної конференції „Теоретичні та прикладні аспекти радіотехніки і приладобудування“ |
| Data de publicació: | 8-de -2017 |
| Date of entry: | 28-de -2018 |
| Editorial: | ТНТУ TNTU |
| Place of the edition/event: | Тернопіль Ternopil |
| Temporal Coverage: | 8-9 червня 2017 року 8-9 June 2017 |
| UDC: | 629.7.615.3 |
| Paraules clau: | виробничий робот схват об'єкт маніпулювання кінематика robot gripper object kinematics |
| Number of pages: | 2 |
| Page range: | 38-39 |
| Start page: | 38 |
| End page: | 39 |
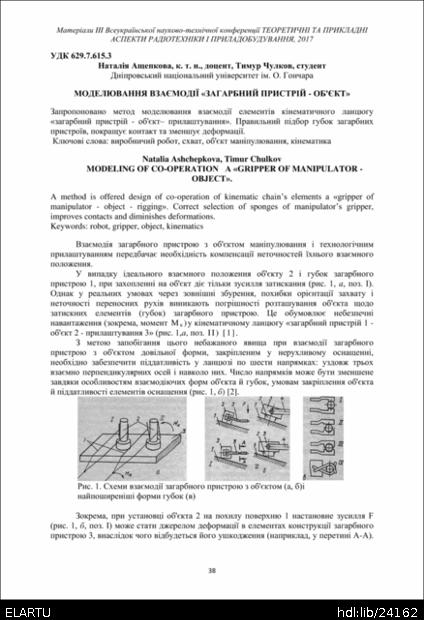
| Resum: | Запропоновано метод моделювання взаємодії елементів кінематичного ланцюгу «загарбний пристрій - об'єкт– прилаштування». Правильний підбор губок загарбних пристроїв, покращує контакт та зменшує деформації. A method is offered design of co-operation of kinematic chain’s elements a «gripper of manipulator - object - rigging». Correct selection of sponges of manipulator’s gripper, improves contacts and diminishes deformations. |
| URI: | http://elartu.tntu.edu.ua/handle/lib/24162 |
| ISBN: | 978-617-7331-38-3 |
| Copyright owner: | © Тернопільський національний технічний університет імені Івана Пулюя, 2017 |
| References (Ukraine): | 1. Механика промышленных роботов. Кн..1. Кинематика и динамика: учеб. пособие / Е. И. Воробьев, С. А. Попов, Г. И. Шевелёва. / под. ред. К. В. Фролова, Е. И. Воробьева. – К.: Вища школа, 1988. – 304 с. 2. Бурдаков С. Ф. Проектирование манипуляторов промышленных роботов и роботизированных комплексов / С. Ф. Бурдаков, В. А. Дьяченко, А. Н. Тимофеев // М.: Высшая школа, 1986. – 264 с. 3. Шахинпур М. Курс робототехники. Пер. с англ. / М. Шахинпур. –М.: Мир, 1990.–527 с. 4. Кудрявцев Е. М. Mathcad 2000 Pro / Е. М. Кудрявцев – М.: ДМК Пресс. – 2001. – С. 530–540. |
| References (International): | 1. Mekhanika promyshlennykh robotov. Kn..1. Kinematika i dinamika: ucheb. posobie, E. I. Vorobev, S. A. Popov, H. I. Sheveleva., pod. red. K. V. Frolova, E. I. Vorobeva, K., Vishcha shkola, 1988, 304 p. 2. Burdakov S. F. Proektirovanie manipuliatorov promyshlennykh robotov i robotizirovannykh kompleksov, S. F. Burdakov, V. A. Diachenko, A. N. Timofeev, M., Vysshaia shkola, 1986, 264 p. 3. Shakhinpur M. Kurs robototekhniki. transl. from English, M. Shakhinpur. –M., Mir, 1990.–527 p. 4. Kudriavtsev E. M. Mathcad 2000 Pro, E. M. Kudriavtsev – M., DMK Press, 2001, P. 530–540. |
| Content type: | Conference Abstract |
| Apareix a les col·leccions: | Ⅲ Всеукраїнська науково-технічна конференція „Теоретичні та прикладні аспекти радіотехніки і приладобудування“ (2017) |
Arxius per aquest ítem:
| Arxiu | Descripció | Mida | Format | |
|---|---|---|---|---|
| FPT_2017_Ashchepkova_N-Modeling_of_co_operation_38-39.pdf | 1,04 MB | Adobe PDF | Veure/Obrir | |
| FPT_2017_Ashchepkova_N-Modeling_of_co_operation_38-39.djvu | 94,63 kB | DjVu | Veure/Obrir | |
| FPT_2017_Ashchepkova_N-Modeling_of_co_operation_38-39__COVER.png | 504,67 kB | image/png | Veure/Obrir |
Els ítems de DSpace es troben protegits per copyright, amb tots els drets reservats, sempre i quan no s’indiqui el contrari.