Použijte tento identifikátor k citaci nebo jako odkaz na tento záznam:
http://elartu.tntu.edu.ua/handle/123456789/1242
| Název: | Система навігації робота з використанням зображення ПЗЗ матриці |
| Další názvy: | Navigation system robot with image CCD |
| Autoři: | Паламар, Михайло Іванович Величко, Р. |
| Datum vydání: | 2011 |
| Date of entry: | 8-čer-2011 |
| Nakladatel: | Тернопільський національний технічний університет ім. Івана Пулюя |
| Place of the edition/event: | Тернопіль, Україна |
| UDC: | 621.326 |
| Klíčová slova: | обробка зображень робот цифровий сигнальний процесор ПЗЗ матриця |
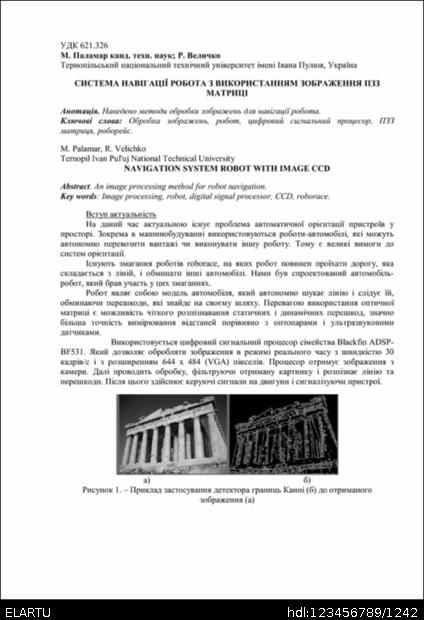
| Abstrakt: | Наведено методи обробки зображень для навігації робота |
| URI: | http://elartu.tntu.edu.ua/handle/123456789/1242 |
| Vyskytuje se v kolekcích: | Конференція „Теоретичні та прикладні аспекти радіотехніки і приладобудування“ (2011) Наукові публікації працівників кафедри приладів і контрольно-вимірювальних систем |
Soubory připojené k záznamu:
| Soubor | Popis | Velikost | Formát | |
|---|---|---|---|---|
| Dokument1.djvu | 116,59 kB | DjVu | Zobrazit/otevřít | |
| Dokument1.pdf | 369,73 kB | Adobe PDF | Zobrazit/otevřít | |
| Dokument1__COVER.png | 159,04 kB | image/png | Zobrazit/otevřít |
Všechny záznamy v DSpace jsou chráněny autorskými právy, všechna práva vyhrazena.