Будь ласка, використовуйте цей ідентифікатор, щоб цитувати або посилатися на цей матеріал:
http://elartu.tntu.edu.ua/handle/123456789/1242
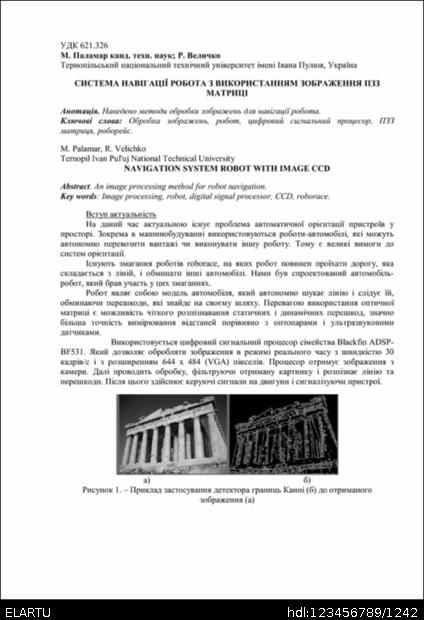
| Назва: | Система навігації робота з використанням зображення ПЗЗ матриці |
| Інші назви: | Navigation system robot with image CCD |
| Автори: | Паламар, Михайло Іванович Величко, Р. |
| Дата публікації: | 2011 |
| Дата внесення: | 8-чер-2011 |
| Видавництво: | Тернопільський національний технічний університет ім. Івана Пулюя |
| Місце видання, проведення: | Тернопіль, Україна |
| УДК: | 621.326 |
| Теми: | обробка зображень робот цифровий сигнальний процесор ПЗЗ матриця |
| Короткий огляд (реферат): | Наведено методи обробки зображень для навігації робота |
| URI (Уніфікований ідентифікатор ресурсу): | http://elartu.tntu.edu.ua/handle/123456789/1242 |
| Розташовується у зібраннях: | Конференція „Теоретичні та прикладні аспекти радіотехніки і приладобудування“ (2011) Наукові публікації працівників кафедри приладів і контрольно-вимірювальних систем |
Файли цього матеріалу:
| Файл | Опис | Розмір | Формат | |
|---|---|---|---|---|
| Dokument1.djvu | 116,59 kB | DjVu | Переглянути/відкрити | |
| Dokument1.pdf | 369,73 kB | Adobe PDF | Переглянути/відкрити | |
| Dokument1__COVER.png | 159,04 kB | image/png | Переглянути/відкрити |
Усі матеріали в архіві електронних ресурсів захищені авторським правом, всі права збережені.