Utilizza questo identificativo per citare o creare un link a questo documento:
http://elartu.tntu.edu.ua/handle/123456789/17945
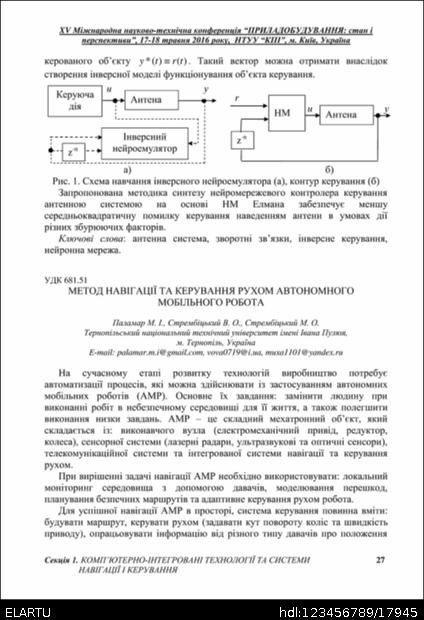
| Titolo: | Метод навігації та керування рухом автономного мобільного робота |
| Autori: | Паламар, Михайло Іванович Стрембіцький, Володимир Олексійович Стрембіцький, Михайло Олексійович |
| Affiliation: | Паламар М. І., Стрембіцький В. О., Стрембіцький М. О. Тернопільський національний технічний університет імені Івана Пулюя, м. Тернопіль, Україна E-mail: palamar.m.i@gmail.com, vova0719@i.ua, muxa1101@yandex.ru |
| Conference/Event: | XV Міжнародна науково-технічна конференція “Приладобудування: стан і перспективи” |
| Data: | 17-mag-2016 |
| Date of entry: | 23-set-2016 |
| Editore: | Тернопільський національний технічний університет ім. Івана Пулюя |
| Place of the edition/event: | НТУУ “КПІ”, м. Київ, Україна |
| Temporal Coverage: | 17-18 травня 2016 року |
| UDC: | 681.51 |
| Parole chiave: | автономний мобільний робот система керування навігаційна система сенсор |
| Number of pages: | 2 |
| Page range: | 27-28 |
| Abstract: | На сучасному етапі розвитку технологій виробництво потребує автоматизації процесів, які можна здійснювати із застосуванням автономних мобільних роботів (АМР). Основне їх завдання: замінити людину при виконанні робіт в небезпечному середовищі для її життя, а також полегшити виконання низки завдань. АМР – це складний мехатронний об’єкт, який складається із: виконавчого вузла (електромеханічний привід, редуктор, колеса), сенсорної системи (лазерні радари, ультразвукові та оптичні сенсори), телекомунікаційної системи та інтегрованої системи навігації та керування рухом. |
| URI: | http://elartu.tntu.edu.ua/handle/123456789/17945 |
| Content type: | Other |
| È visualizzato nelle collezioni: | Зібрання статей |
File in questo documento:
| File | Descrizione | Dimensioni | Formato | |
|---|---|---|---|---|
| selection_2.pdf | 324,52 kB | Adobe PDF | Visualizza/apri | |
| selection_2.djvu | 77,61 kB | DjVu | Visualizza/apri | |
| selection_2__COVER.png | 358,11 kB | image/png | Visualizza/apri |
Tutti i documenti archiviati in DSpace sono protetti da copyright. Tutti i diritti riservati.