Link lub cytat.
http://elartu.tntu.edu.ua/handle/lib/28782
| Tytuł: | Алгоритму руху автономного робота використовуючи залежності прямокутного трикутника |
| Inne tytuły: | Algorithm of stand – alone robot movement using the laws of right triangle |
| Authors: | Смолюх, Іван Камуля, Павло Smoliukh, Ivan Kamulia, Pavlo |
| Akcesoria: | Тернопільський національний технічний університет імені Івана Пулюя, Україна |
| Cytat: | Смолюх І. Алгоритму руху автономного робота використовуючи залежності прямокутного трикутника / Іван Смолюх, Павло Камуля // Матеріали Ⅳ Міжнародної науково-технічної конференції „Теоретичні та прикладні аспекти радіотехніки, приладобудування і компʼютерних технологій“ присвячена 80-ти річчю з дня народження професора Я.І. Проця, 20-21 червня 2019 року. — Т. : ФОП Паляниця В. А., 2019. — С. 62–63. — (Математичні моделі та інформаційні технології). |
| Bibliographic description: | Smoliukh I., Kamulia P. (2019) Alhorytmu rukhu avtonomnoho robota vykorystovuiuchy zalezhnosti priamokutnoho trykutnyka [Algorithm of stand – alone robot movement using the laws of right triangle]. Materialy Ⅳ Mizhnarodnoi naukovo-tekhnichnoi konferentsii "Teoretychni ta prykladni aspekty radiotekhniky, pryladobuduvannia i kompʼiuternykh tekhnolohii" prysviachena 80-ty richchiu z dnia narodzhennia profesora Ya.I. Protsia (Tern., 20-21 June 2019), pp. 62-63 [in Ukrainian]. |
| Część publikacji: | Матеріали Ⅳ Міжнародної науково-технічної конференції „Теоретичні та прикладні аспекти радіотехніки, приладобудування і компʼютерних технологій“ присвячена 80-ти річчю з дня народження професора Я.І. Проця, 2019 |
| Konferencja/wydarzenie: | Ⅳ Міжнародна науково-технічна конференція „Теоретичні та прикладні аспекти радіотехніки, приладобудування і комп’ютерних технологій“ присвячена 80-ти річчю з дня народження професора Я.І. Проця |
| Journal/kolekcja: | Матеріали Ⅳ Міжнародної науково-технічної конференції „Теоретичні та прикладні аспекти радіотехніки, приладобудування і компʼютерних технологій“ присвячена 80-ти річчю з дня народження професора Я.І. Проця |
| Data wydania: | 20-cze-2019 |
| Date of entry: | 15-lip-2019 |
| Wydawca: | ФОП Паляниця В. А. FOP Palyanitsa V. A. |
| Place edycja: | Тернопіль Ternopil |
| Zakresu czasowego: | 20-21 червня 2019 року 20-21 June 2019 |
| UDC: | 519.85 |
| Słowa kluczowe: | автономний робот алгоритм руху прямокутний трикутник stand – alone robot movement algorithm right triangle |
| Strony: | 2 |
| Zakres stron: | 62-63 |
| Główna strona: | 62 |
| Strona końcowa: | 63 |
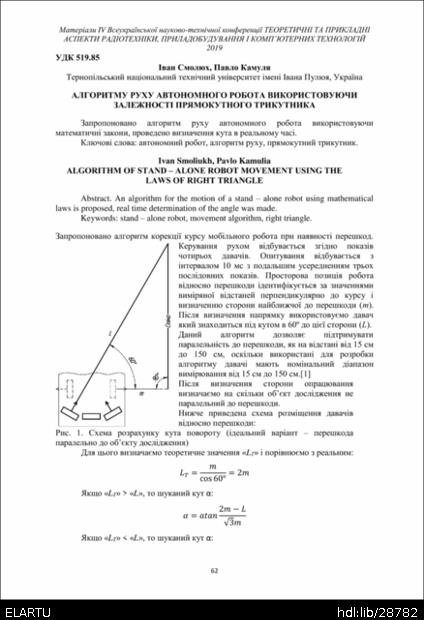
| Abstract: | Запропоновано алгоритм руху автономного робота використовуючи
математичні закони, проведено визначення кута в реальному часі. An algorithm for the motion of a stand – alone robot using mathematical laws is proposed, real time determination of the angle was made. |
| URI: | http://elartu.tntu.edu.ua/handle/lib/28782 |
| ISBN: | 978-617-7331-85-7 |
| Właściciel praw autorskich: | © Тернопільський національний технічний університет імені Івана Пулюя, укладання, оформлення, 2019 |
| Wykaz piśmiennictwa: | 1. Datasheet GP2Y0A02YK0F Sharp. 2. Matlab в инженерных и научных расчетах А. Ф. Дащенко, В. Х. Кирилов, Л. Л. Колумиец, В. Ф. Оробей; Одесса «Астропринт», 2003 3. Введение в математическое моделирование: Учеб. Пособие / Под ред. П. В. Трусова. – М.: Университетская книга, Логос,2007. – 440 с. |
| References: | 1. Datasheet GP2Y0A02YK0F Sharp. 2. Matlab v inzhenernykh i nauchnykh raschetakh A. F. Dashchenko, V. Kh. Kirilov, L. L. Kolumiets, V. F. Orobei; Odessa "Astroprint", 2003 3. Vvedenie v matematicheskoe modelirovanie: Ucheb. Posobie, ed. P. V. Trusova, M., Universitetskaia kniha, Lohos,2007, 440 p. |
| Typ zawartości: | Conference Abstract |
| Występuje w kolekcjach: | Ⅳ Міжнародна науково-технічна конференція „Теоретичні та прикладні аспекти радіотехніки, приладобудування і компʼютерних технологій“ (2019) |
Pliki tej pozycji:
| Plik | Opis | Wielkość | Format | |
|---|---|---|---|---|
| TPARP_2019_Smoliukh_I-Algorithm_of_stand-alone_62-63.pdf | 1,57 MB | Adobe PDF | Przeglądanie/Otwarcie | |
| TPARP_2019_Smoliukh_I-Algorithm_of_stand-alone_62-63.djvu | 109,11 kB | DjVu | Przeglądanie/Otwarcie | |
| TPARP_2019_Smoliukh_I-Algorithm_of_stand-alone_62-63__COVER.png | 895,96 kB | image/png | Przeglądanie/Otwarcie |
Pozycje DSpace są chronione prawami autorskimi