Будь ласка, використовуйте цей ідентифікатор, щоб цитувати або посилатися на цей матеріал:
http://elartu.tntu.edu.ua/handle/lib/25547
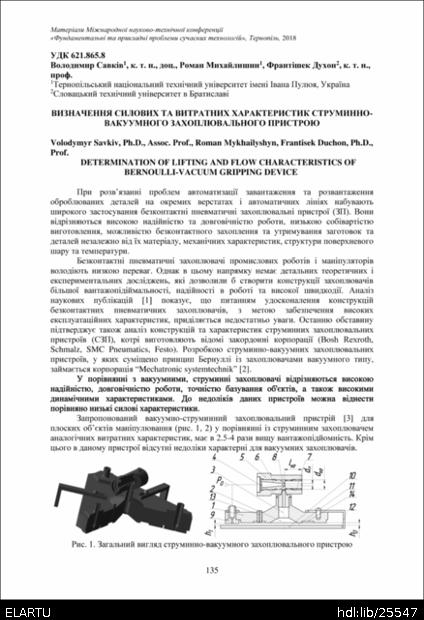
| Назва: | Визначення силових та витратних характеристик струминно-вакуумного захоплювального пристрою |
| Інші назви: | Determination of lifting and flow characteristics of bernoulli-vacuum gripping device |
| Автори: | Савків, Володимир Богданович Михайлишин, Роман Ігорович Духон, Франтішек Savkiv, Volodymyr Mykhailyshyn, Roman Duchon, Frantisek |
| Приналежність: | Тернопільський національний технічний університет імені Івана Пулюя, Україна Словацький технічний університет в Братиславі |
| Бібліографічний опис: | Савків В. Б. Визначення силових та витратних характеристик струминно-вакуумного захоплювального пристрою / Володимир Савків, Роман Михайлишин, Франтішек Духон // Матеріали Міжнародної науково-технічної конференції „Фундаментальні та прикладні проблеми сучасних технологій“ до 100 річчя з дня заснування НАН України та на вшанування пам’яті Івана Пулюя (100 річчя з дня смерті), 22-24 травня 2018. — Т. : ТНТУ, 2018. — С. 135–136. — (Сучасні технології в машино- та приладобудуванні). |
| Bibliographic description: | Savkiv V., Mykhailyshyn R., Duchon F. (2018) Viznachennia silovikh ta vitratnikh kharakteristik struminno-vakuumnoho zakhopliuvalnoho pristroiu [Determination of lifting and flow characteristics of bernoulli-vacuum gripping device]. Materials of the International scientific and technical conference "Fundamental and applied problems of modern technologies" to the 100th anniversary of the foundation of the National Academy of Sciences of Ukraine and to the commemoration of Ivan Puluj (100th anniversary from the day of death) (Tern., 22-24 May 2018), pp. 135-136 [in Ukrainian]. |
| Є частиною видання: | Матеріали Міжнародної науково-технічної конференції „Фундаментальні та прикладні проблеми сучасних технологій“ до 100 річчя з дня заснування НАН України та на вшанування пам’яті Івана Пулюя (100 річчя з дня смерті), 2018 Materials of the International scientific and technical conference "Fundamental and applied problems of modern technologies" to the 100th anniversary of the foundation of the National Academy of Sciences of Ukraine and to the commemoration of Ivan Puluj (100th anniversary from the day of death), 2018 |
| Конференція/захід: | Міжнародна науково-технічна конференція „Фундаментальні та прикладні проблеми сучасних технологій“ |
| Журнал/збірник: | Матеріали Міжнародної науково-технічної конференції „Фундаментальні та прикладні проблеми сучасних технологій“ до 100 річчя з дня заснування НАН України та на вшанування пам’яті Івана Пулюя (100 річчя з дня смерті) |
| Дата публікації: | 22-тра-2018 |
| Дата внесення: | 15-чер-2018 |
| Видавництво: | ТНТУ TNTU |
| Місце видання, проведення: | Тернопіль Ternopil |
| Часове охоплення: | 22-24 травня 2018 22-24 May 2018 |
| УДК: | 621.865.8 |
| Кількість сторінок: | 2 |
| Діапазон сторінок: | 135-136 |
| Початкова сторінка: | 135 |
| Кінцева сторінка: | 136 |
| URI (Уніфікований ідентифікатор ресурсу): | http://elartu.tntu.edu.ua/handle/lib/25547 |
| ISBN: | 978-966-305-093-5 |
| Власник авторського права: | © Тернопільський національний технічний університет імені Івана Пулюя, 2018 |
| URL-посилання пов’язаного матеріалу: | http://www.mechatronic.at/technology/end-effectors.html |
| Перелік літератури: | 6. Babur O. Evaluation of handling results of various materials using a non-contact end-effector. / O. Babur, E. Fehmi, F. Fehim // Industrial Robot: An International Journal.-2003. – № 30(4). – P. 363–369. 7. Офіційний веб сайт фірми Mechatronic systemtechnik gmbh [Електронний ресурс]-Режим доступу: http://www.mechatronic.at/technology/end-effectors.html 8. Justification of Design and Parameters of Bernoulli-Vacuum Gripping Device / V. Savkiv, R. Mykhailyshyn, F. Duchon, O. Fendo // International Journal of Advanced Robotic Systems. – 2017. – DOI: 1729881417741740. |
| References: | 6. Babur O. Evaluation of handling results of various materials using a non-contact end-effector., O. Babur, E. Fehmi, F. Fehim, Industrial Robot: An International Journal.-2003, No 30(4), P. 363–369. 7. Ofitsiinyi veb sait firmy Mechatronic systemtechnik gmbh [Electronic resource]-Access mode: http://www.mechatronic.at/technology/end-effectors.html 8. Justification of Design and Parameters of Bernoulli-Vacuum Gripping Device, V. Savkiv, R. Mykhailyshyn, F. Duchon, O. Fendo, International Journal of Advanced Robotic Systems, 2017, DOI: 1729881417741740. |
| Тип вмісту: | Conference Abstract |
| Розташовується у зібраннях: | Міжнародна науково-технічна конференція „Фундаментальні та прикладні проблеми сучасних технологій“ (2018) |
Файли цього матеріалу:
| Файл | Опис | Розмір | Формат | |
|---|---|---|---|---|
| MNTK_2018_2018_Savkiv_V-Determination_of_lifting_135-136.pdf | 605,22 kB | Adobe PDF | Переглянути/відкрити | |
| MNTK_2018_2018_Savkiv_V-Determination_of_lifting_135-136.djvu | 99,12 kB | DjVu | Переглянути/відкрити | |
| MNTK_2018_2018_Savkiv_V-Determination_of_lifting_135-136__COVER.png | 455,75 kB | image/png | Переглянути/відкрити |
Усі матеріали в архіві електронних ресурсів захищені авторським правом, всі права збережені.